
¿Te imaginas un mundo donde las paredes de tu hogar se comporten como las mágicas del universo de Harry Potter? Donde, con un simple gesto o pensamiento, una pared se transforme en un estante para tus libros, un perchero para tu abrigo o incluso un escritorio improvisado para trabajar. Lo que parece salido de la ficción está más cerca de la realidad gracias a las superficies robóticas. En la convergencia de la robótica, el diseño arquitectónico y la ingeniería de materiales, estas superficies emergen como una revolución silenciosa que promete redefinir la relación entre los espacios físicos y sus usuarios. Jesse Gonzalez, investigador en Carnegie Mellon, ha desarrollado un enfoque audaz hacia estas tecnologías, imaginando un futuro donde las paredes, muebles y estructuras no solo sean funcionales, sino dinámicamente adaptativas, capaces de responder a nuestras necesidades en tiempo real. En el siguiente artículo exploraremos los avances técnicos detrás de estas superficies, sus posibles aplicaciones y los retos que aún deben resolverse para convertir esta visión en realidad.
El Concepto de Superficies Robóticas
Las superficies robóticas son estructuras físicas que integran actuadores programables, capaces de cambiar de forma y función en respuesta a comandos o estímulos. En esencia, estas superficies son el puente entre lo estático y lo dinámico, una transformación que permite a los objetos arquitectónicos responder de manera tangible a sus usuarios.
En el corazón de esta tecnología se encuentra la idea de células programables: pequeñas unidades independientes que pueden inflarse, retraerse o cambiar su configuración para alterar la forma y funcionalidad de una superficie. Estas células, cuando se combinan en una matriz, permiten crear superficies dinámicas que pueden manipular objetos, generar texturas táctiles o incluso redefinir el espacio físico en el que operan.
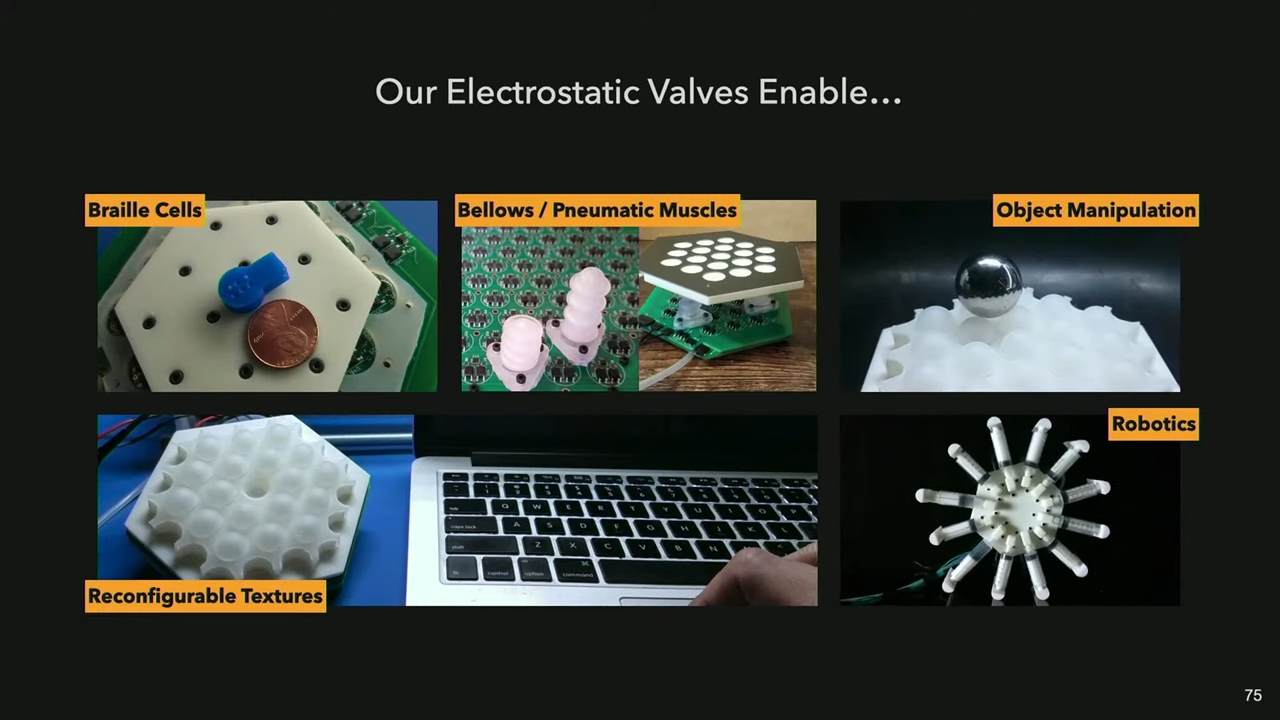
Entre los usos iniciales de estas tecnologías se incluyen:
- Superficies táctiles dinámicas: Creación de sistemas de lectura en braille que pueden configurarse al instante.
- Manipulación de objetos: Capacidad de dirigir objetos físicos a través de matrices de burbujas inflables.
- Arquitectura adaptativa: Muebles y paredes que se reconfiguran según las necesidades del usuario.

Más Allá del Objeto: Hacia Entornos Adaptativos
La visión de Gonzalez va más allá de las aplicaciones individuales, imaginando un mundo donde las superficies robóticas se integren a nivel arquitectónico. Imagina entrar a un apartamento pequeño y observar cómo las paredes responden activamente a tus necesidades:
- Una sección de la pared podría transformarse en un estante para colocar las bolsas del supermercado.
- Un gancho para colgar tu abrigo podría emerger de manera automática.
- Una vez que no sean necesarios, los elementos se retraen, liberando espacio.
Este concepto de entornos adaptativos recuerda a los escenarios fantásticos de películas como Encanto, donde las casas parecen cobrar vida. Sin embargo, esta visión no es pura fantasía; es una realidad técnica en desarrollo, impulsada por avances en materiales inteligentes, neumática y control electromecánico.
El Desafío de Fabricar Superficies Robóticas
A pesar de su potencial, las superficies robóticas enfrentan un obstáculo importante: la complejidad en su fabricación. Las tecnologías actuales dependen de ensamblajes modulares donde cada actuador se construye y conecta individualmente. Este enfoque, aunque funcional, no es escalable.
Un ejemplo típico es el uso de válvulas neumáticas convencionales, donde cada válvula requiere su propio montaje y calibración. Este proceso no solo es costoso, sino también impráctico para aplicaciones a gran escala, como paredes o muebles interactivos.

Innovación en Diseño: La Fabricación por Capas
Para superar estas limitaciones, Gonzalez ha introducido un enfoque revolucionario basado en la fabricación por capas. Este método aprovecha técnicas maduras como el grabado fotoquímico y el corte láser para fabricar múltiples actuadores simultáneamente. En lugar de ensamblar componentes individuales, las superficies se construyen apilando capas prefabricadas.
Un avance clave en este enfoque es la integración de válvulas electrostáticas directamente en placas de circuitos impresos (PCBs). Estas válvulas, diseñadas como patrones en las capas de los PCBs, eliminan la necesidad de ensamblajes individuales. Esto permite construir sistemas complejos con cientos de actuadores con el mismo esfuerzo que un sistema más pequeño.
Cómo Funcionan las Válvulas Electrostáticas
El diseño de estas válvulas aprovecha la electrostática para controlar el flujo de aire a través de una membrana flexible. Este proceso funciona de la siguiente manera:
- Estado inactivo: La membrana se presiona contra la salida de aire, bloqueando el flujo.
- Estado activo: Al aplicar un voltaje, la membrana se adhiere al electrodo superior, permitiendo que el aire fluya libremente.
Este diseño no solo simplifica el ensamblaje, sino que también es altamente eficiente. Por ejemplo, un sistema con 127 actuadores se puede construir con la misma facilidad que uno con solo siete, gracias a la uniformidad del proceso de fabricación.
Explorando Nuevas Dimensiones: Superficies Plegables y Espacios 3D
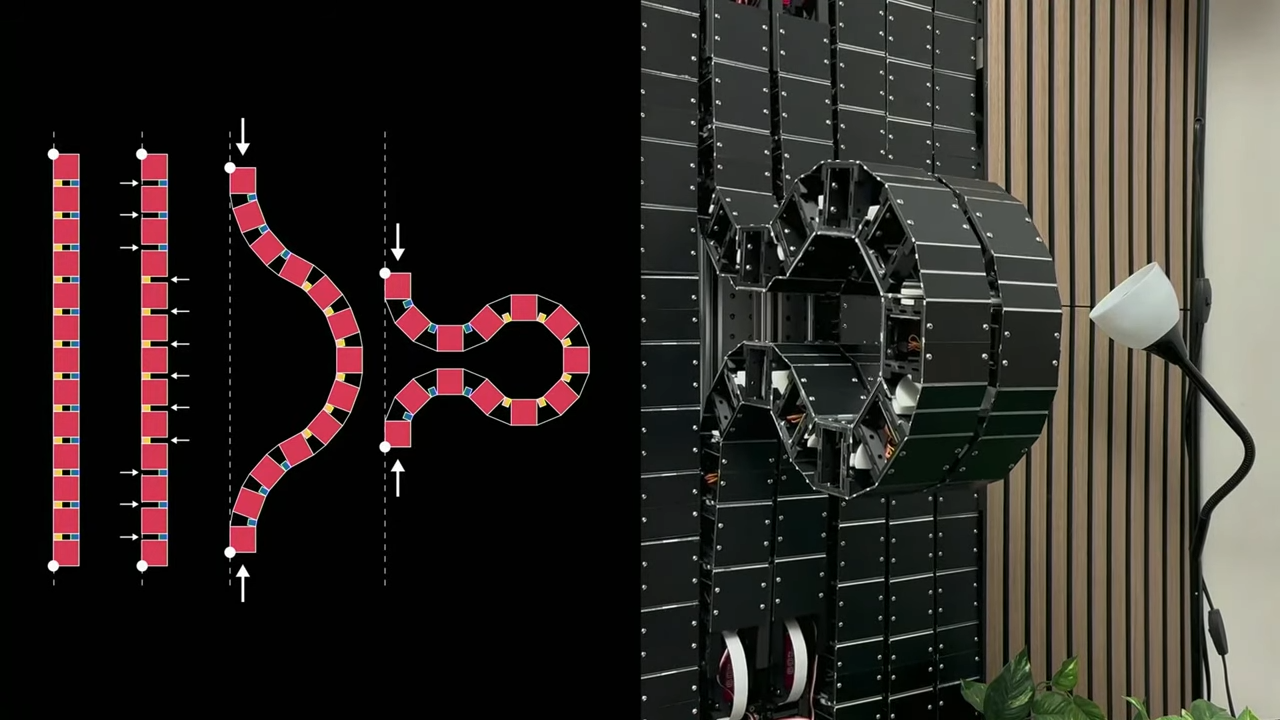
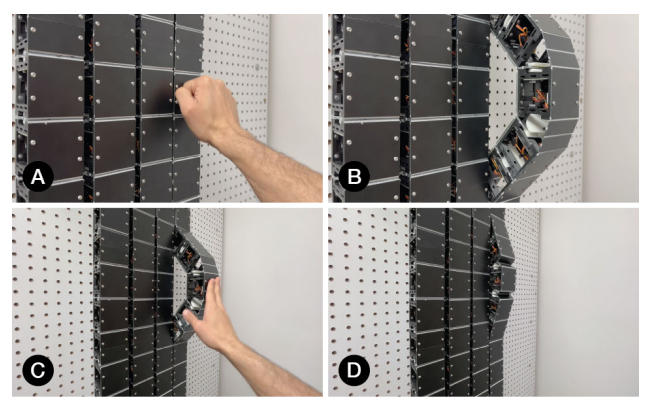
Aunque muchas superficies robóticas actuales operan en un plano bidimensional, Gonzalez ha llevado esta tecnología un paso más allá al introducir superficies plegables. Inspirándose en el origami, estas superficies pueden transformarse de estructuras planas a configuraciones tridimensionales.
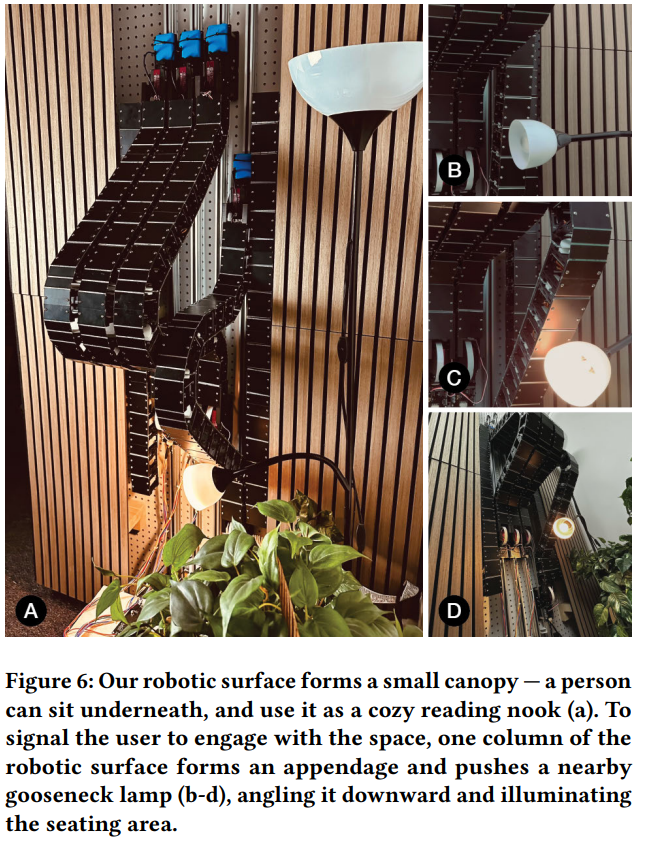
Este enfoque utiliza bisagras integradas en PCBs flexibles, que se ensamblan en estructuras plegables. Pequeños motores ajustan las configuraciones, permitiendo que las superficies adopten formas complejas. Un ejemplo impresionante es una pared robótica que puede desplegar estanterías, mesas o incluso formar áreas de trabajo temporales.

Aplicaciones Potenciales: Más Allá de la Arquitectura
El impacto de las superficies robóticas no se limita a la arquitectura. Estas tecnologías tienen aplicaciones en:
- Interfaces táctiles avanzadas: Superficies que responden al tacto para dispositivos electrónicos o sistemas educativos.
- Robótica blanda: Integración en juguetes, ropa inteligente o dispositivos médicos.
- Automatización industrial: Manipulación precisa de objetos en líneas de ensamblaje.
- Diseño de muebles inteligentes: Mesas y sillas que se ajustan automáticamente a las necesidades del usuario.

Retos por Resolver
A pesar de los avances, quedan desafíos importantes:
- Escalabilidad: Aunque la fabricación por capas ha simplificado el proceso, aún es necesario reducir los costos para aplicaciones comerciales masivas.
- Durabilidad: Las superficies deben ser robustas para soportar el desgaste diario.
- Integración de sensores: Incorporar sistemas de detección táctil y de movimiento para enriquecer la interacción.
El Futuro: Hacia un Entorno Verdaderamente Inteligente
La visión de Gonzalez y su equipo marca el comienzo de una nueva era en la interacción entre humanos y espacios físicos. Las superficies robóticas podrían convertirse en un componente esencial de los hogares inteligentes, oficinas y espacios públicos del futuro. Al integrar estas tecnologías con sistemas de inteligencia artificial y sensores avanzados, los entornos podrían anticiparse y adaptarse automáticamente a las necesidades humanas.
En última instancia, estas innovaciones representan no solo un avance técnico, sino también una transformación cultural en cómo concebimos y utilizamos los espacios que habitamos
https://interactive-structures.org/assets//publications/2023-10-robotic-walls/paper.pdf
#InnovaciónTecnológica
#Robótica
#DiseñoArquitectónico
#SuperficiesInteligentes
#TecnologíaAdaptativa
#ArquitecturaFuturista
#TransformaciónDigital
#EspaciosInteractivos
#IngenieríaDeMateriales
#InteracciónHumanoMáquina
#RobóticaArquitectónica
#EntornosAdaptativos
#FuturoDelDiseño
#TecnologíaDelFuturo
#Automatización
#DiseñoSostenible
#IoT
#HogarInteligente
#RobóticaBlanda
#MobiliarioInteligente